
计算机视觉。我们前期文章分享了很多关于类似这方面的文章。包括人脸识别三部曲。目标检测。目标追踪等。本期文章。我们介绍一下如何使用opencv来进行条形码的检测。毕竟超市里面的物品都是有价格条形码。如何进行opencv条形码的检测。便成了无人超市需要重点关注并需要解决的问题 

opencv条形码的检测
opencv条形码的检测
importnumpyasnpimportcv2image=cv2.imread("11.jpg")gray=cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
首先我们导入需要进行检测的图片。并把RGB颜色空间的图片转换成灰度照片 

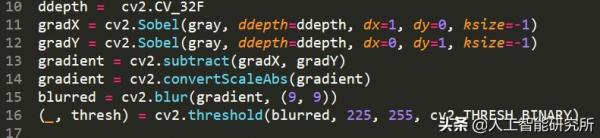
代码截图
ddepth=cv2.CV_32FgradX=cv2.Sobel(gray,ddepth=ddepth,dx=1,dy=0,ksize=-1)gradY=cv2.Sobel(gray,ddepth=ddepth,dx=0,dy=1,ksize=-1)gradient=cv2.subtract(gradX,gradY)gradient=cv2.convertScaleAbs(gradient)blurred=cv2.blur(gradient,(9,9))(_,thresh)=cv2.threshold(blurred,225,255,cv2.THRESH_BINARY)
然后。我们使用cv.sobel算子进行图片的X Y 轴的边缘检测。并使用cv2.subtract(gradX, gradY)计算图片的梯度。以Sobel算子计算x。y方向上的梯度。之后在x方向上减去y方向上的梯度。通过这个减法。我们留下具有高水平梯度和低垂直梯度的图像区域。然后cv2.convertScaleAbs返回图片的unit8格式。参考图片如下。 

高水平梯度和低垂直梯度的图像区域
函数原型:dst=cv2.Sobel(src,ddepth,dx,dy[,dst[,ksize[,scale[,delta[,borderType]]]]])
函数参数:
1. src – 需要处理的图像
2. ddepth – 图像的深度。-1表示采用的是与原图像相同的深度。目标图像的深度必须大于等于原图像的深度
3. dx – 对x轴方向求导的阶数。一般为0、1、2。其中0表示这个方向上没有求导
4. dy – 对y轴方向求导的阶数。一般为0、1、2。其中0表示这个方向上没有求导
5. dst – 目标图像
6. ksize – Sobel算子的大小。必须为1、3、5、7
7. scale – 缩放导数的比例常数。默认情况下没有伸缩系数
8. delta – 可选增量。 将会加到最终的dst中。同样。默认情况下没有额外的值加到dst中
9. borderType – 图像边界的模式。这个参数默认值为cv2.BORDER_DEFAUL
在经过处理后。需要用convertScaleAbs()函数将其转回原来的uint8形式。否则将无法显示图像。而只是一副灰色的窗口。
函数原型:dst=cv2.convertScaleAbs(src[,dst[,alpha[,beta]]])其中可选参数alpha是伸缩系数。beta是加到结果上的一个值。结果返回uint8类型的图片#absX=cv2.convertScaleAbs(x)#转回uint8#absY=cv2.convertScaleAbs(y)

代码截图
在图像的读取中。会存在一些噪噪声点。如一些白噪声。因此我们需要进行去噪操作
opencv4种去噪操作
1.cv2.blur(均值滤波)2.cv2.boxfilter(方框滤波)3.cv2.Guassiannblur(进行高斯滤波)4.cv2.medianBlur(进行中值滤波)
1.cv2.blur(img,(3,3))进行均值滤波参数说明:img表示输入的图片。(3,3)表示进行均值滤波的方框大小
2.cv2.boxfilter(img,-1,(3,3),normalize=True)表示进行方框滤波。参数说明当normalize=True时。与均值滤波结果相同。normalize=False。表示对加和后的结果不进行平均操作。大于255的使用255表示
3.cv2.Guassianblur(img,(3,3),1)表示进行高斯滤波。参数说明:1表示σ。x表示与当前值得距离。计算出的G(x)表示权重值
4.cv2.medianBlur(img,3)#中值滤波。相当于将9个值进行排序。取中值作为当前值参数说明:img表示当前的图片。3表示当前的方框尺寸


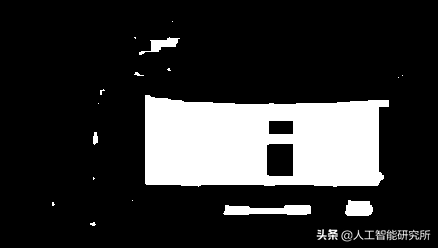
阈值处理(cv2.threshold) 后图片
opencv: 阈值处理(cv2.threshold)
cv2.threshold(src,thresh,maxval,type)src:源图片。必须是单通道thresh:阈值。取值范围0~255maxval:填充色。取值范围0~255type:阈值类型。具体见下表


阈值类型
图片形态学
kernel=cv2.getStructuringElement(cv2.MORPH_RECT,(21,7))closed=cv2.morphologyEx(thresh,cv2.MORPH_CLOSE,kernel)closed=cv2.erode(closed,None,iterations=4)closed=cv2.dilate(closed,None,iterations=4)


代码截图
通过以上操作。我们已经检测到了条形码的大致位置。然后使用内核函数获取图片外形的形态学。并分别执行4次形态学腐蚀与膨胀。获取更精确的图片形状位置
kernel=cv2.getStructuringElement这个函数的第一个参数表示内核的形状。有三种形状可以选择矩形:MORPH_RECT;交叉形:MORPH_CROSS;椭圆形:MORPH_ELLIpsE;
第二和第三个参数分别是内核的尺寸以及锚点的位置。一般在调用erode以及dilate函数之前。先定义一个Mat类型的变量来获得
getStructuringElement函数的返回值: 对于锚点的位置。有默认值Point(-1,-1)。表示锚点位于中心点。element形状唯一依赖锚点位置。其他情况下。锚点只是影响了形态学运算结果的偏移。
cv2.morphologyEx(src,op,kernel)进行各类形态学的变化参数说明:src传入的图片op进行变化的方式kernel表示方框的大小2.op=cv2.MORPH_OPEN进行开运算。指的是先进行腐蚀操作。再进行膨胀操作3.op=cv2.MORPH_CLOSE进行闭运算。指的是先进行膨胀操作。再进行腐蚀操作开运算:表示的是先进行腐蚀。再进行膨胀操作闭运算:表示先进行膨胀操作。再进行腐蚀操作

cv2.morphologyEx后图片
形态学图片转换完成后。进行图片的腐蚀与膨胀。这里主要是获取更精确的外形。
腐蚀与膨胀属于形态学操作。所谓的形态学。就是改变物体的形状。形象理解一些:腐蚀=变瘦 膨胀=变胖。主要是采用 cv2.erode() 和 cv2.dilate()。需要注意一点的是。腐蚀和膨胀主要针对二值化图像的白色部分 

腐蚀与膨胀后图片
图片外轮廓的绘制
cnts=cv2.findContours(closed.copy(),cv2.RETR_EXTERNAL,cv2.CHAIN_appROX_SIMPLE)cnts=cnts[0]c=sorted(cnts,key=cv2.contourArea,reverse=True)[0]rect=cv2.minAreaRect(c)box=cv2.boxPoints(rect)box=np.int0(box)cv2.drawContours(image,[box],-1,(0,255,0),3)cv2.imshow("Image",image)cv2.waitKey(0)


代码截图
我们通过以上的步骤。已经成功锁定图片条形码的位置。然后使用cv2.findContours函数找到图片的外形。并画出图片的外形。
(_,cnts,_)=cv2.findContours(参数一:二值化图像closed.copy(),参数二:轮廓类型#cv2.RETR_EXTERNAL,#表示只检测外轮廓#cv2.RETR_CCOMP,#建立两个等级的轮廓,上一层是边界#cv2.RETR_LIST,#检测的轮廓不建立等级关系#cv2.RETR_TREE,#建立一个等级树结构的轮廓#cv2.CHAIN_APPROX_NONE,#存储所有的轮廓点。相邻的两个点的像素位置差不超过1参数三:处理近似方法#cv2.CHAIN_APPROX_SIMPLE,#例如一个矩形轮廓只需4个点来保存轮廓信息#cv2.CHAIN_APPROX_TC89_L1,#cv2.CHAIN_APPROX_TC89_KCOS)
然后对找到的所有轮廓点进行重新排序
sorted(iterable,key=None,reverse=False)参数说明:iterable--可迭代对象。key--主要是用来进行比较的元素。只有一个参数。具体的函数的参数就是取自于可迭代对象中。指定可迭代对象中的一个元素来进行排序。reverse--排序规则。reverse=True降序。reverse=False升序(默认)。返回值返回重新排序的列表。
排序完成后的list传递给cv2.minAreaRect(Points)函数
其中points是点集。数据类型为ndarray。array((x1,y1),(x2,y2),….,(xn,yn))
而minAreaRect就是求出在上述点集下的最小面积矩形
rect[0]返回矩形的中心点。(x,y)。实际上为y行x列的像素点
利用cv2.boxPoints(rect)可以返回矩形四个点的值。其中cv2.boxPoints(rect)[0]为point[0]。cv2.boxPoints(rect)[1]为point[1].rect[1]返回矩形的长和宽rect[2]返回矩形的旋转角度
有了box的外形4个图形点。便可以使用cv2.drawContours函数把4个点连接起来。形成一个矩形轮廓。最后显示图片
opencv条形码的检测
您还感兴趣的文章推荐- 十大帅哥明星排行榜 全球颜值排名前十男2021
- 好用的面膜排行榜前十名 十大顶级面膜排行榜
- 面霜排行榜前十强 平价好用的面霜公认最好用推荐
- 面霜排行榜前十名 30岁好用的面霜公认最好用
- 隔离霜排行榜前十名的牌子 十大防晒隔离霜排行榜10强
以上就是由互联网推广工程师 网创网 整理编辑的,如果觉得有帮助欢迎收藏转发~
本文地址:https://www.wangchuang8.com/90686.html,转载请说明来源于:网创推广网
声明:本站部分文章来自网络,如无特殊说明或标注,均为本站原创发布。如若本站内容侵犯了原著者的合法权益,可联系进行处理。分享目的仅供大家学习与参考,不代表本站立场。







评论(2)
opencv图像识别算法 opencv图像识别检测 这篇解答确实也是太好了
图片,参数,形态学,函数,图像,矩形,条形码,梯度,操作,轮廓
计算机视觉。我们前期文章分享了很多关于类似这方面的文章。包括人脸识别三部曲。目标检测。目标追踪等。本期文章。我们介绍一下